该项目为将大卷焊锡通过放卷,牵引,收卷将材料分配到可配额的设备
二、 项目描述
该项目为分装类型设备,主要为将已经生产好的大卷焊锡材料均匀分布在可以在市场配额的模具上。
三、 项目要求
速率:采用变频器进行控制收放卷要求线速度为60M/分
张力:现场采用配重块进行摆臂控制,通过人为设定摆臂平衡位置,张力要控制稳定,在启动开始以及停止结束,不能出现摆臂大幅度晃动导致触碰传感器导致停机问题
纠偏:材料分层间距需要一致,不能出现一边厚一边薄的问题
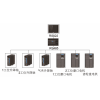
四、硬件配置
|
序号 |
产品名称 |
型号 |
备注 |
数量 |
|
1 |
PLC |
H1S-1616MT |
控制器 |
1 |
|
2 |
变频器 |
MD380T0.7G |
0.7KW |
1 |
|
3 |
变频器 |
MD380T1.5G |
1.5KW |
1 |
|
|
|
|
|
|
五、方案设计
本次设备没有触摸屏设计,其主要通过按钮控制启停,另外有编码器实现实时计米显示数码管,其张力设定为将摆杆中间平衡位置,将摆臂放平衡后观察变频器模拟量实时电压信号实现为设定张力值实现的张力控制
(一)方案说明
采用485方式进行PLC与变频器进行控制,相对于传统需要硬接线启停,方便现场接线,并且采用485方式的情况下也兼容了其通讯的拓展性
(二)方案解析
针对张力控制:将摆杆信号接入变频器的AI中作为反馈源,以摆杆处于中间位置为目标设定张力,采用牵引的AO接入收放卷AI作为主频率源,辅助频率源为PID(摆杆中间位置为设定张力值进行的控制)纠偏为简易纠偏控制,采用正反限位进行方向切换无可控间距设定选项。
(三)现场难点以及解决方案
张力铭记
现场在启动以及开始的时候为了保证摆杆不发生波动,需要铭记保持即便变频器处于停止状态下的MV输出记录
摆杆平衡
在启动以及停止中,不能出现摆杆波动太大导致触碰传感器导致的停机问题,所以针对摆杆需要采用多段PID进行控制处理